Contributed to Granta Innovation's AI system for detecting cancer. Created modules
for automatic data annotation and segmentation models for both the organ and cancer.
Created state-of-the-art segmentation models using fast.ai and PyTorch, achieving better
resuts on public datasets than are in published research.




Have been working on multitask perception models and designing, developing and testing attention
based and other approaches to passing data in image space into the control model.
Using a passive anthropomorphic hand developed by the Bio Inspired Robotics Lab
at CUED, we work both in real life and in simulation to have it learn to pick up objects.
It is motivated by the idea that with a smarter controller, you can reduce complexity
of the physical manipulator while being able to do the same things.
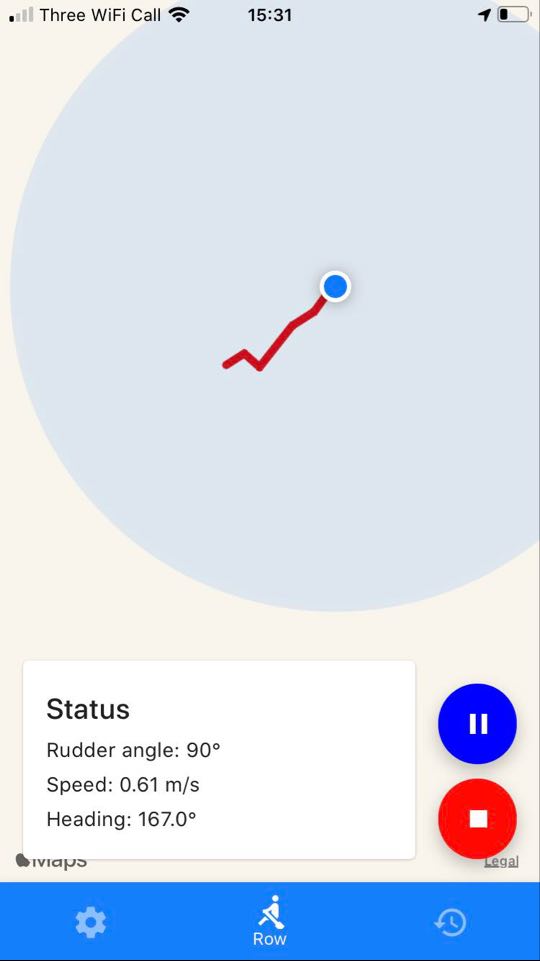
In small sweep rowing boats, steering is done with the stroke's foot which is very
uncomfortable and leads to knee problems. We replace it with an autonomous system that
follows the course of the river, gives audio instructions in sharp turns and can be
controlled by buttons on the oar in case of obstacles.
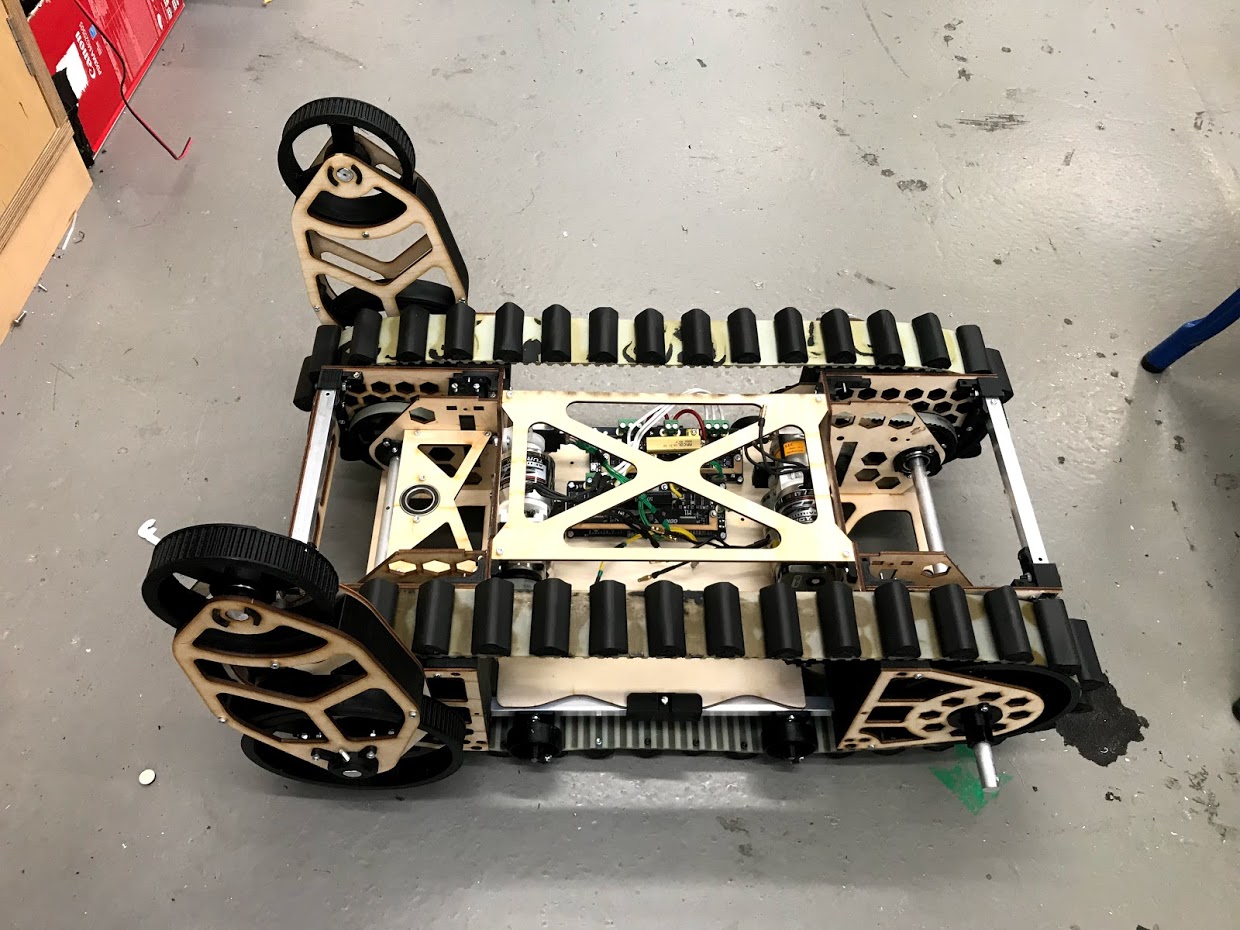
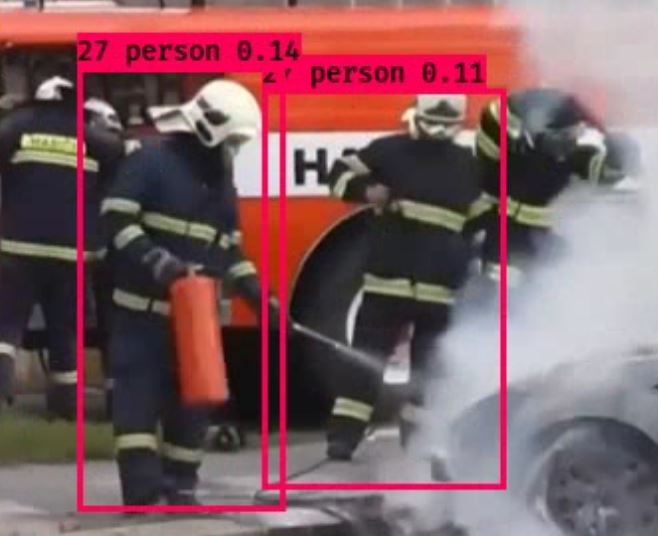

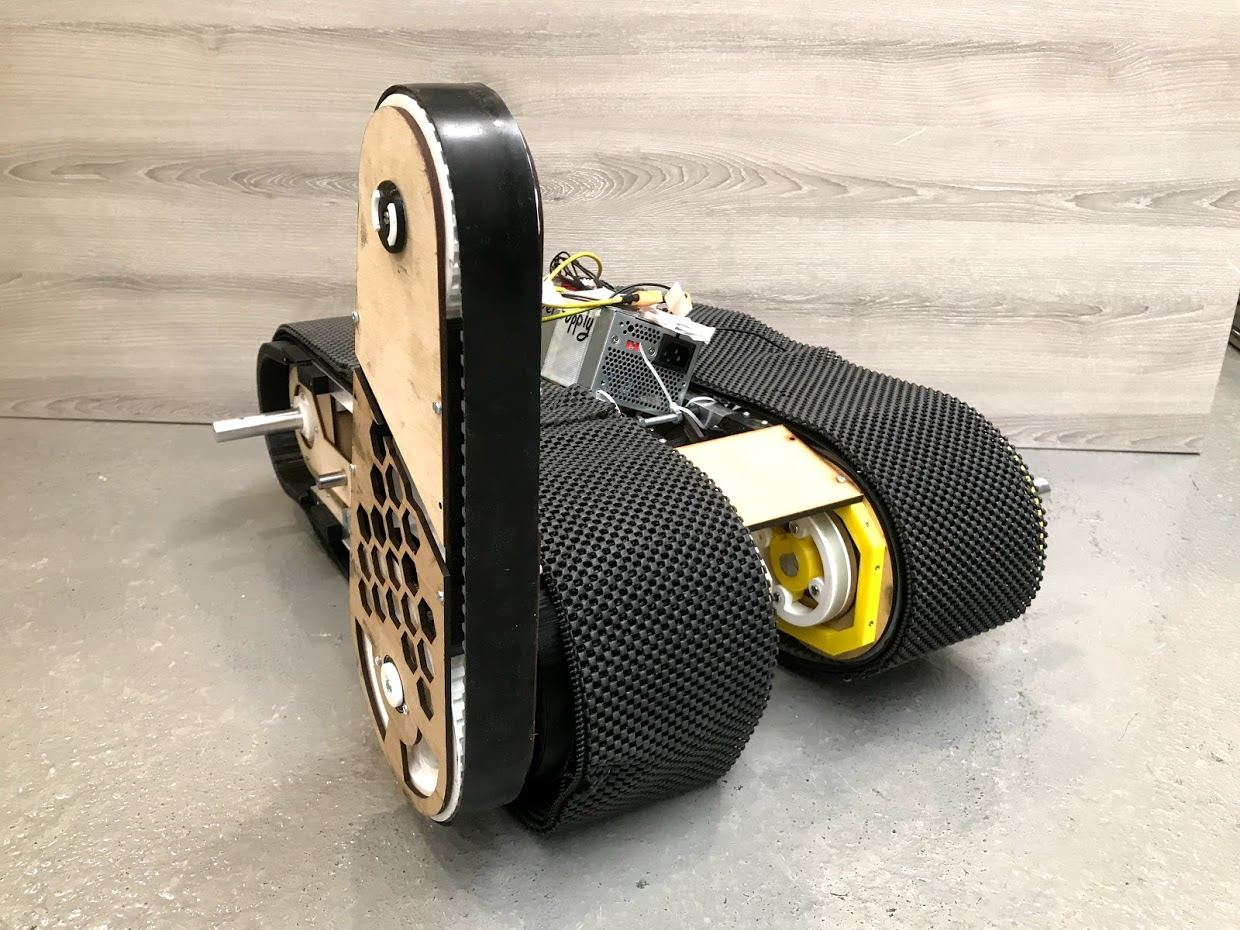
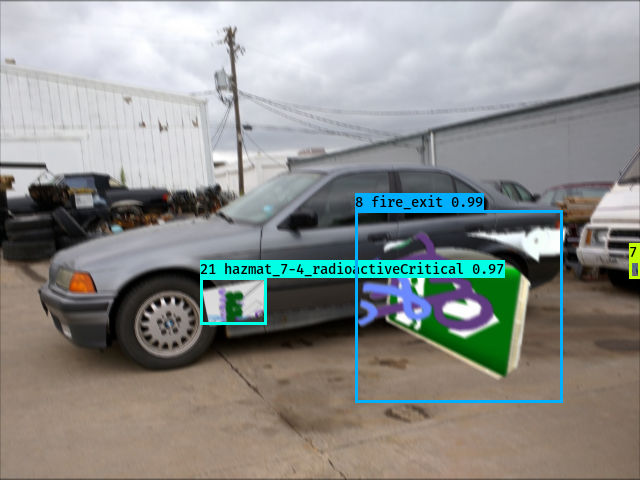
Developing a disaster response robot capable of autonomously navigating through complicated
terrain, detecting objects and manipulating objects. My work is on control systems and
object detection. For object detection I use YOLOv3 trained on a custom generated dataset.


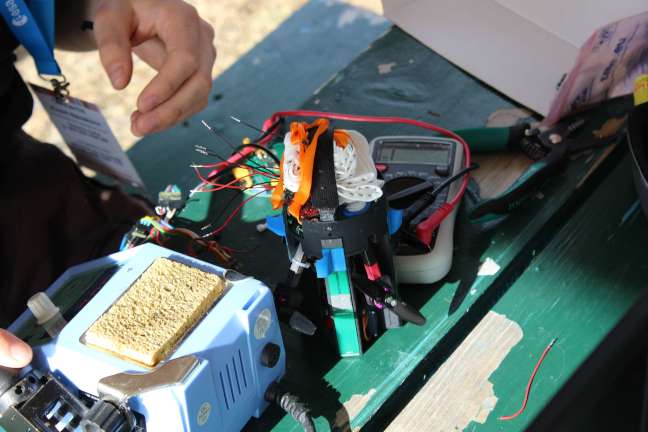

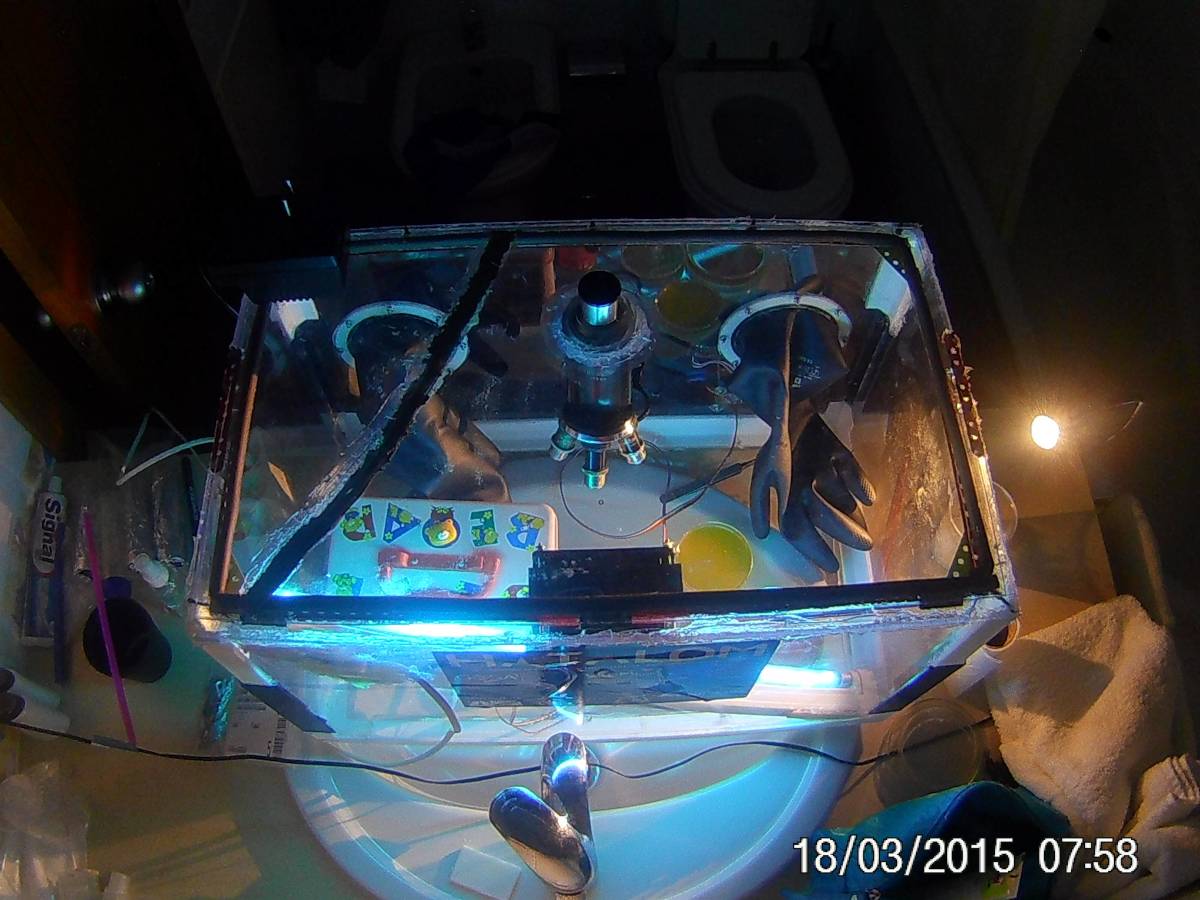
Designed a planetary probe the size of a soft drink can that was launched by a rocket into 2km
altitude from where it landed whilst making measurements and sending them to the base station.
We measured spectroscopic, chemical and mechanical properties of the atmosphere and looking
for direct signs of life. The probe used custom SMD circuits and could propulsiely land as
a drone. I did the mechanical and electronic design and wrote the on-board software.

At TECHFEST Munich 19 we teamed up with WACKER to use computer vision to breach the skill gap
that is limiting the use of more sustainable mortars in developing countries. We made an app
that gives workers real time instructions and is able to precisely detect the amount of water
in the mortar. We placed 1st out of ~40 teams. We then continued working on the project
and our MVP is currently being tested by WACKER in India.


Developing cheap sensors that can be placed into the road and measure the weight of any vehicles
passing over them. They achieve it by using change of capacitance during mechanical
deformations. The potential of the sensors is to offer a cheap option to check overweight trucks
that damage the road.

Engineering • 1st Year Grade: First Class • 2st Year Grade: Passed (classes not awarded due to remote examination) Activities: Cambridge University Robotics (CUR) - VP -> President,
Hackbridge - Research projects director
Engineering Student

Worked on developing machine learning systems for multitask perception and
passing perception data to policy.

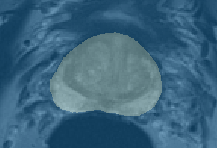
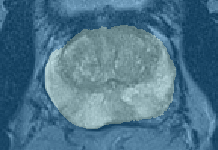
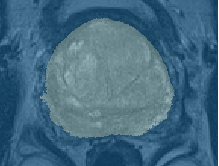
Worked on developing machine learning systems and automatic data annotation
for cancer detection in MRI images.
Formulated values to lead a disciplined expansion and growth into meaningful
areas like outreach and research and forming partnerships to enable that effectively.
• Expanding the society's activities into academic research and coordinating
the projects. • Organizing an introductory course into robotics for first year students. • Running a summer outreach camp to introduce six-form students to robotics
and engineering at Cambridge through a series of exciting games, workshops and
interesting lectures. • Connected with Oxford to run a competition at the end of the fresher project. • Formed partnerships with Autodesk and other companies. • Leading a joint effort with most other technical societies at Cambridge
to offer a range of introductory projects and workshops
in all technical areas.

• Expanding the society's activities into robotics, mechanical engineering and other
areas. • Sourcing projects from academics and entrepreneurs. • Coordinating students in projects and organizing clusters to discuss the projects
and learn from the others' experience.
Computer science Extraordinrily studying the undergraduate course whilst still at grammar school. Notable courses: Algorithms & data structures I-V, Linear algebra I-II,
Mathematical analysis I-II, Computer principles & architectures,
Artificial intelligence I-II, Deep learning


• Lead design of the probe and all the surrounding devices. • Sourced over 3000€ from private companies and public institutions to support
the project.

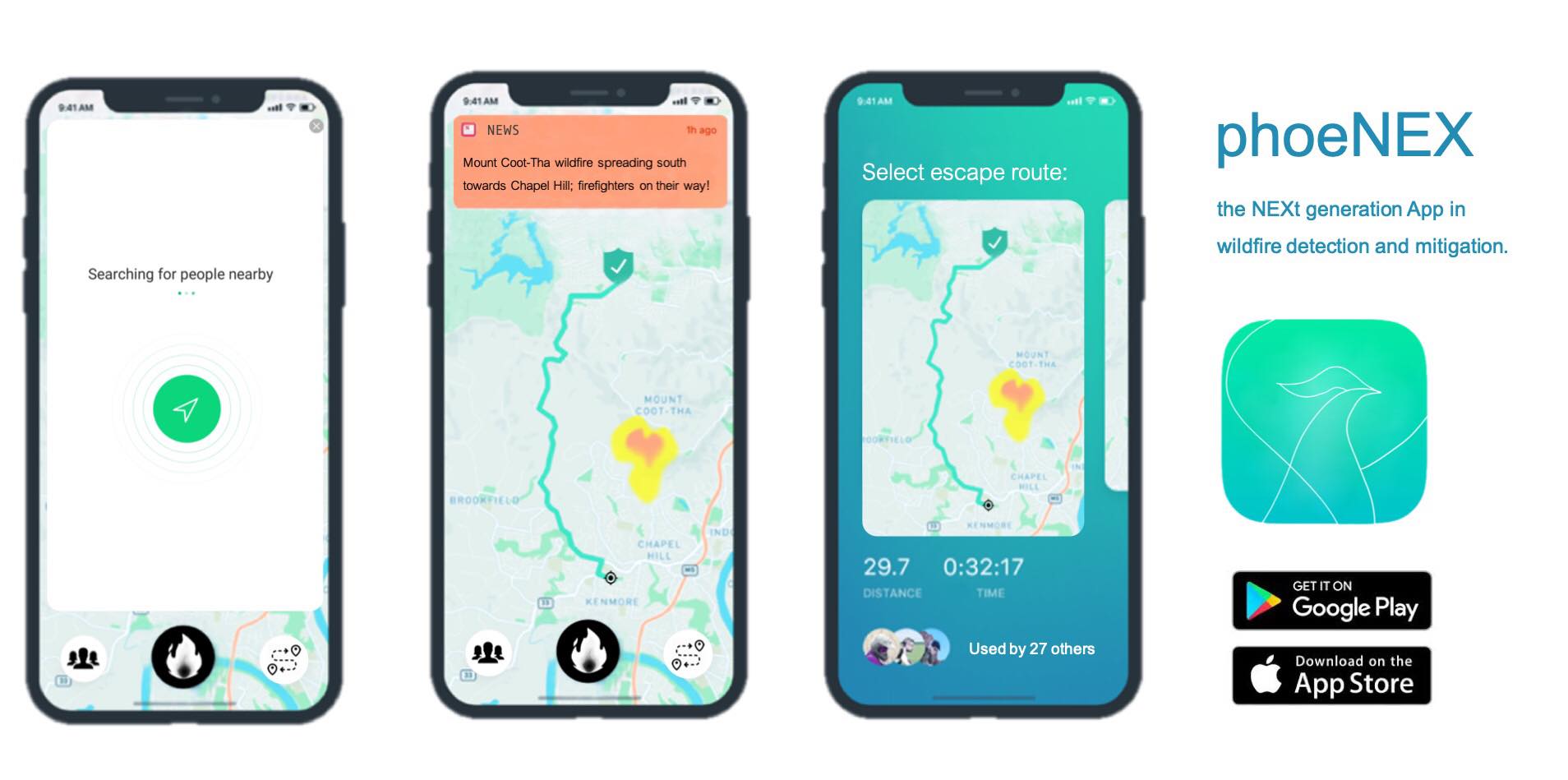
We built a community wildfire mitigation app and recieved the Best Mission Concept award,
placing top 6 out of over 2000 teams worldwide
Simulation and a neurevolution based controller

An international hackathon in Munich, awarded for an app that tries to bring
sustainable building materials into developing countries.
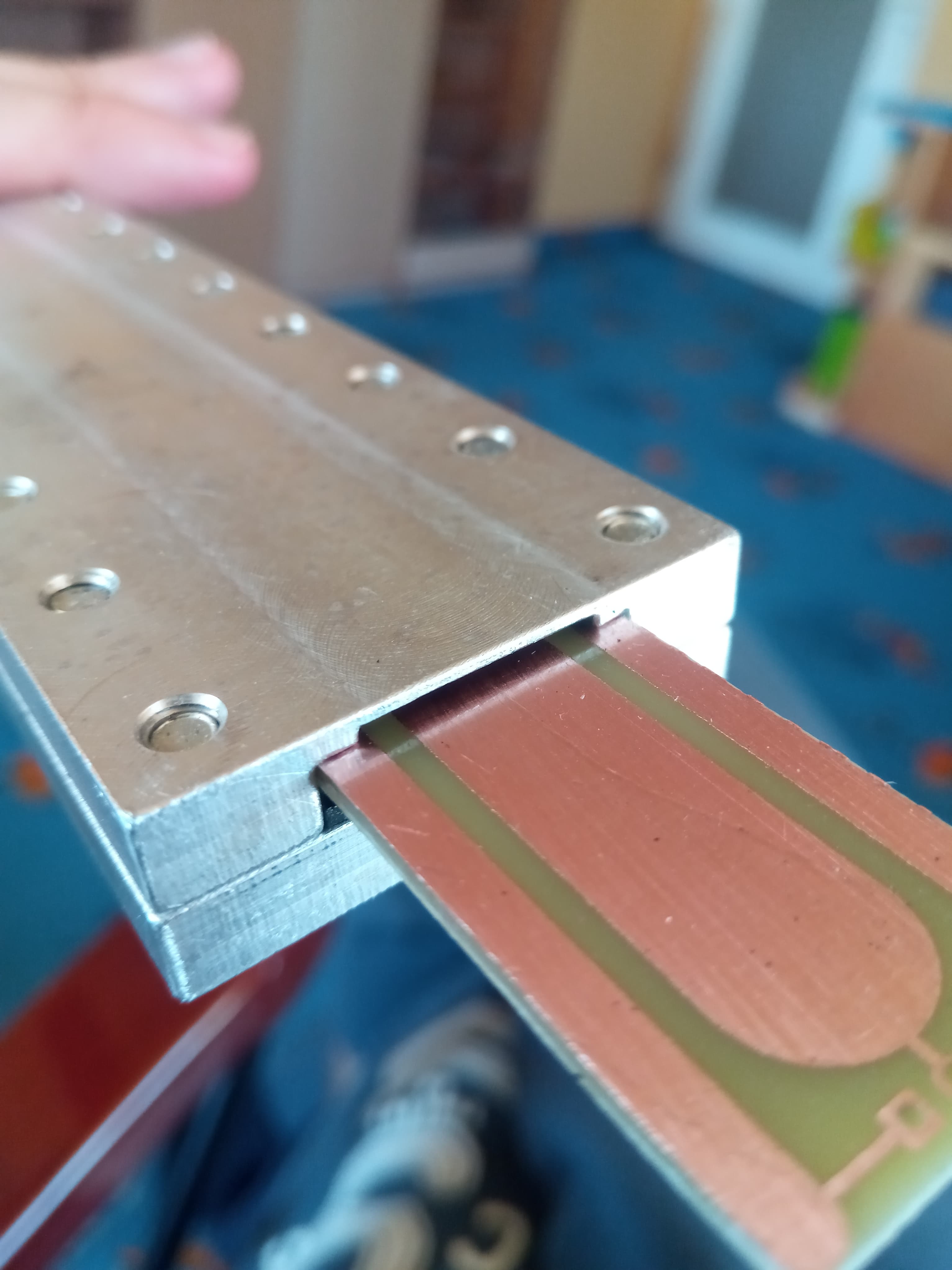
Designed the strongest and cheapest skewed cantilever in a competition for 1st
year Cambridge Engineers.


National winners International best final report - detailing our project and its scientific impact